はじめに
僧帽弁修復術は、これまで開胸手術が標準的な治療法とされてきました。しかし、低侵襲手術の発展により、右側開胸(thoracotomy)やミニ開胸(minithoracotomy)、さらにはロボット支援手術が行われるようになりました。従来のロボット支援僧帽弁修復術では、比較的小さな皮膚切開で行うものの、依然として肋骨の開大が必要な場合があり、完全な低侵襲手術とは言えませんでした。
今回発表された完全内視鏡下ロボット僧帽弁修復術(Total Endoscopic Robotic Mitral Valve Repair)は、ロボット手術の新たな地平を切り開く手法です。本技術は、ポートのみ(最大8mm)を使用し、肋骨の開大を完全に回避することで、より低侵襲で精度の高い手術を可能にします。本稿では、本術式の臨床的意義、新規性、既存手法との比較、期待される利点と課題について解説します。
完全内視鏡下ロボット僧帽弁修復術とは
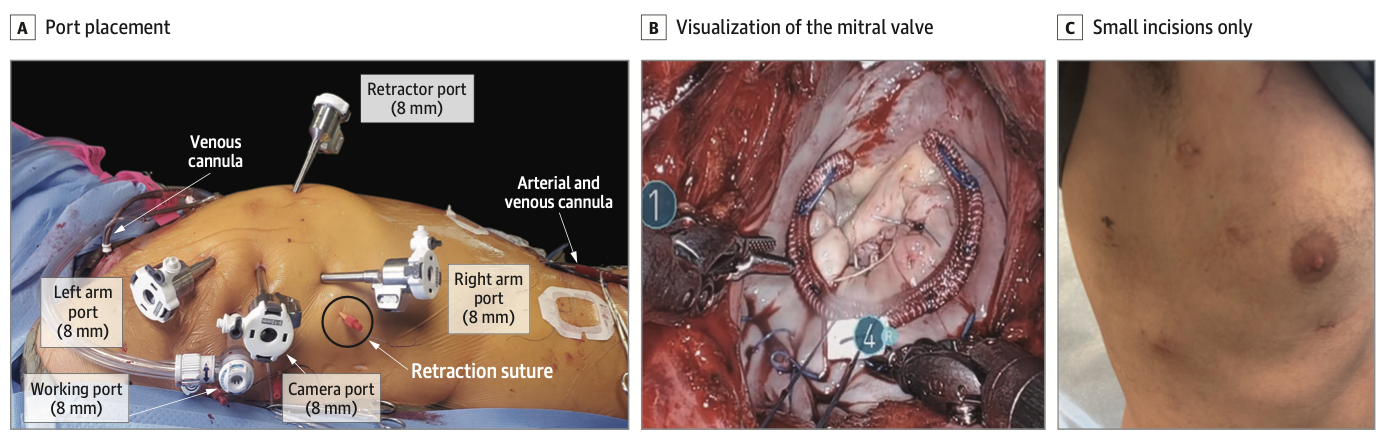
完全内視鏡下ロボット僧帽弁修復術は、従来の手法と比べて最も低侵襲なアプローチです。この手法では、最大8mmのポートのみを使用し、肋骨を広げることなく手術を行います。、最大8mmのポートを利用し、ロボット支援下で僧帽弁の修復を行います。 使用するポートは以下の通りです。
- カメラポート(8mm)
- 右腕ポート(8mm)
- 左腕ポート(8mm)
- 牽引ポート(8mm)
この術式では、僧帽弁修復に必要な以下の手技をすべて実施できます。
- 弁輪形成(annuloplasty)
- 弁尖切除(leaflet resection)
- 交連形成術(commissuroplasty)
- 人工腱索(neochords)の設置
また、手術においてはバーブ付き縫合糸(barbed sutures)を用いた補強縫合を行い、耐久性の高い修復を実現しています。
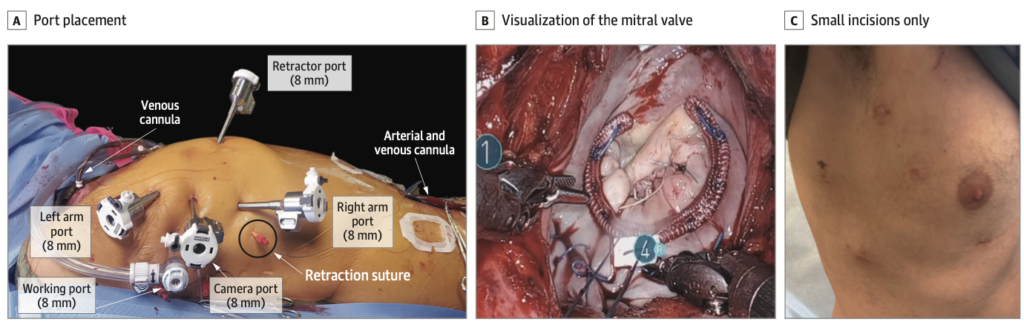
なお、完全内視鏡下ロボット僧帽弁修復術であっても、心臓の内腔で行う手術であるため、一時的に心臓を停止(心停止)し、血液循環を人工的に維持する必要があります。つまり、人工心肺は必要です。経皮的な大腿動脈・大腿静脈カニュレーションを用いるのが一般的です。
既存のロボット手術との比較
ロボット支援僧帽弁修復術はすでに一般的になりつつありますが、既存のロボット手術は肋骨を開大する必要があるため、完全な低侵襲ではありませんでした。一方、本術式ではポートのみを使用するため、
- 肋間神経ブロックが不要または最小限で済む
- 術後疼痛の軽減が期待できる
- 術後回復が早く、平均1日での退院が可能
といった顕著な利点があります。
最大の利点は、肋骨を広げる必要がなく、術後の痛みを最小限に抑えられる点です。特に、肋間神経の凍結療法(cryoablation)を併用することで、術後の痛み管理がさらに向上します。これにより、患者の入院期間が短縮され、回復が早まり、再入院率も低下します。実際に、術後1日目での退院が可能な症例も報告されています。
従来の胸骨切開や開胸術と比較して、ロボット支援手術では3次元カメラと手首の自由度が高い器具を使用するため、僧帽弁の視認性が向上し、技術的な修復が容易になります。これにより、従来の手法で生じていた僧帽弁の歪みを防ぐことができます。
臨床的エビデンスと期待される効果
現在、本術式と従来の胸骨正中切開(sternotomy)を比較した直接的な試験はありません。しかし、過去のロボット支援僧帽弁修復術と従来手術の比較研究では、以下のような結果が得られています。
Moriらによる最大規模の後ろ向き研究(2024年)では、2015年から2021年にかけて61,322人の患者を対象に、ロボット支援手術(7,692人)、開胸術(15,725人)、胸骨切開術(39,705人)を比較しました。その結果、ロボット支援手術は、僧帽弁置換術への転換率が1%と最も低く、30日以内の再入院率、入院期間、死亡率も最も低いことが明らかになりました。
- 僧帽弁置換への移行率
- ロボット支援手術: 1%
- 開胸手術(右側開胸やミニ開胸): 4%
- 胸骨正中切開: 8%
- 30日以内の再入院率、入院期間、死亡率はロボット手術が最も低い
選択バイアス(ロボット手術や低侵襲開胸手術には軽症の患者が多いなど)はあるかと思われますが、それでも悪くない成績であることがわかります。
本術式では従来のロボット手術の低侵襲性に加えて、さらに傷口の縮小と術後疼痛の軽減が可能となるため、これらの指標はさらに改善すると期待されます。
本術式の普及における課題
この革新的な術式が広く普及するには、以下の5つの課題を克服する必要があります。
- 初期導入コストの高さ
- ロボット手術の設備導入には多額の費用がかかるものの、長期的には入院期間の短縮によるコスト削減が期待されます。
- 学習曲線の克服
- 適切な患者選択と術式の習得には40例以上の経験が必要とされる。
- 手術チームの構築
- ロボット手術には、熟練した外科医だけでなく、麻酔科医、手術室スタッフの高度な連携が求められる。
- 適切な患者選択
- 心臓内科との密接な連携により、外科的治療が最適な患者を見極める必要がある。
- 他の低侵襲治療(TEERなど)との棲み分け
- 経カテーテル僧帽弁修復術(TEER)との適応を適切に判断することが重要。
今後の展望
2015年から2021年にかけて、ロボット僧帽弁修復術の割合は10.9%から14.6%に増加しています。この傾向は今後も続き、2035年頃には、完全内視鏡下手術が標準的な選択肢となる可能性があります。
また、現在年間約165,000件行われている僧帽弁修復術は、今後の高齢化に伴いさらに増加すると考えられます。この市場の拡大に伴い、ロボット手術の技術革新が進むことが予測されます。
まとめ
完全内視鏡下ロボット僧帽弁修復術は、僧帽弁手術の新たな地平を切り開く手法です。本術式の特長は、ポートのみを使用することで肋骨開大を不要にし、術後の疼痛軽減と早期回復を実現する点にあります。
今後の課題としては、初期導入コスト、学習曲線、適切な患者選択の重要性が挙げられます。しかし、ロボット手術の技術が進化し、医療チームのトレーニングが標準化されれば、この手法は今後10年以内に広く普及する可能性が高いでしょう。
参考文献
Aly AH, Guy TS. Total Endoscopic Robotic Mitral Valve Repair Surgery. JAMA Surg. Published online March 19, 2025. doi:10.1001/jamasurg.2025.0154
補足:そもそも、ロボット手術とは??
そもそも、現時点でロボット手術とはどのようなものかを補足しておきます。
ロボット手術におけるロボットの役割
ロボット支援手術では、外科医が直接手を使わずにロボットアームを操作し、手術を行います。ただし、これはロボットが自動的に手術を行うわけではなく、外科医の動きを忠実に再現し、より精密な手技を可能にするためのツールです。ここでは、ロボットが手術においてどのような役割を果たすのかを詳しく解説します。
ロボットアームによる精密な操作
ロボットの最大の利点は、外科医の手の動きを正確に再現しながら、より細かく、安定した動作が可能になることです。
- 手の動きをミリ単位で再現
- ロボットアームは関節を複数持ち、人間の手の可動域を超えた精密な動作が可能です。
- 一般的な手術器具では不可能な角度からの操作も容易になります。
- 手ぶれ補正機能
- 人間の手にはわずかな振動が生じますが、ロボットはそれを補正し、完全に安定した動作を維持します。
- 360度回転が可能
- 人間の手首には回転の制限がありますが、ロボットアームの先端は360度回転し、より自由な動きが可能になります。
- ミニチュア化された器具
- 従来の開胸手術では大きな器具を使用するため、視認性や操作性に制限がありました。
- ロボット手術では、細い器具を肋間の小さなポートから挿入できるため、より低侵襲な手術が可能になります。
3D高解像度カメラによる視認性の向上
従来の内視鏡手術では、2D映像をモニターで見ながら手術を行うため、奥行き感がなく、距離感の把握が難しいという課題がありました。ロボット手術では、3Dカメラが搭載されており、これが大きな利点となります。
- 三次元(3D)の立体映像
- 2Dの内視鏡画像では、奥行きが分かりづらく、組織の微細な違いを判断するのが困難でした。
- ロボット手術では3D映像が提供されるため、実際の視野と同じ感覚で手術ができます。
- 最大10倍の拡大視野
- 僧帽弁などの小さな組織を詳細に観察でき、より精密な縫合や修復が可能になります。
- 自動フォーカス機能
- 伝統的な内視鏡では焦点を合わせるためにカメラの調整が必要でしたが、ロボットでは自動で焦点が調整され、常にクリアな視界が提供されます。
外科医の負担軽減と作業効率の向上
従来の外科手術では、外科医が長時間にわたり不自然な姿勢で手術を行うため、手や肩への負担が大きく、集中力が低下しやすいという問題がありました。ロボット手術では、こうした負担を軽減するための工夫がなされています。
- 快適な姿勢での手術が可能
- 外科医はロボットの操作席(コンソール)に座りながら手術を行うため、身体的な負担が軽減されます。
- 長時間の手術でも集中力を維持しやすくなります。
- 手の動きをスケールダウン
- ロボットの操作システムでは、外科医の手の動きを1/2~1/5に縮小してロボットアームを動かすことができます。
- これにより、大きな動作が極めて微細な動作に変換され、精密な手術が可能になります。
AIとロボット技術の進化
現在のロボットは、外科医の操作を再現するだけですが、将来的にはAIを活用した半自動化手術が進むと考えられています。
- AIによるリアルタイム手術支援
- 最新のAI技術により、ロボットがリアルタイムで血管や神経を識別し、外科医に最適な手術プランを提示するシステムが開発されています。
- これにより、より安全で効率的な手術が可能になります。
- ナビゲーションシステムとの統合
- 術前のCTやMRIデータとロボットシステムを連携させることで、より正確な手術計画が可能になります。
- 3Dマッピング技術を活用し、手術中にリアルタイムで構造を可視化する技術も研究されています。
補足のまとめ
ロボット手術は、外科医の技術を補完し、手術の精度を向上させるために次のような役割を果たします。
- ロボットアームによる高精度な動作
- 手ぶれ補正、360度回転、ミリ単位の精密操作が可能。
- 3D高解像度カメラによる視認性向上
- 奥行きのある立体映像、10倍拡大、自動フォーカス機能により、より精密な操作が可能。
- 外科医の負担軽減
- 自然な姿勢での操作が可能になり、長時間の手術でも集中力を維持できる。
- AI技術の進化
- ナビゲーションシステムとの統合やリアルタイム支援が可能になり、より正確で安全な手術を実現。
現在のロボットは、あくまで「外科医の補助ツール」であり、完全に自動化されているわけではありません。しかし、今後の技術革新により、さらに精密で安全な手術が可能になると期待されています。

